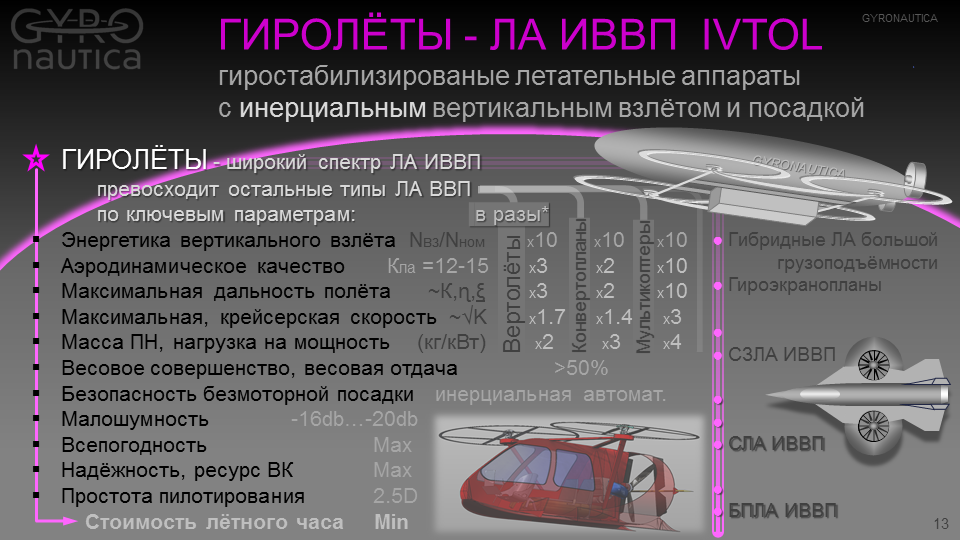
ГИРОЛЁТ - летательный аппарат с инерциальным вертикальным взлётом и инерциальной вертикальной посадкой
Аэродинамика ротора воздушное колесо и концепции винтокрылого ЛА ИВВП
ООО «Гиронавтика»
Россия, Санкт-Петербург
редакция 6.12.2020.
Содержание
Предпосылки транспортной революции
Аэродинамика воздушного колеса
Гиростабилизированный летательный аппарат
Инерциальный вертикальный взлёт
Инерциальная вертикальная посадка
Предпосылки транспортной революции
Любая технология проходит закономерные стадии: созревания, быстрого взрывного роста, длительного эволюционного развития и закономерного угасания. Автомобиль после века триумфальной экспансии, постепенно перестаёт быть удобным, безопасным, и даже, транспортным средством. Хронический транспортный коллапс сдерживает развитие мегаполисов, бездорожье сдерживает развитие регионов. Впервые за историю мирового автомобилестроения наблюдается устойчивый спад продаж и производства в США, Евросоюзе, Японии. Мировую статистику пока спасает растущий автопром Китая.
Будущее развитие персонального транспорта за автоматическими летательными аппаратами вертикального взлёта и посадки (ЛА ВВП). Транспортная ёмкость воздушного пространства на порядки превышает ограниченные возможности дорогой в строительстве и содержании дорожной сети. Создание безопасного, надёжного, всепогодного, малошумного, автоматического летательного аппарата - технически сложная задача, но более реальная, чем создание безопасного автоматического автомобиля, пытающегося двигаться по нашим дорогам, в реальных погодных условиях, в плотном потоке транспортных средств управляемыми людьми, с прочими участниками движения поперёк дороги.
Мировая транспортная революция назрела и неизбежно произойдёт. Всем уже показано Будущее на экранах, есть удивление: почему оно не наступает? Перспективный рынок автоматических летательных аппаратов способен быстро и радикально изменить жизнь и экономику, превысить объёмы автомобилестроения.
Воздушное законодательство направлено на повышение безопасности, регулирует текущее состояние, подчинено экономике, всегда вторично. Сейчас национальные Правила использования воздушного пространства либеральны для пилотируемой лёгкой авиации в зоне G. По мере увеличения интенсивности полётов, неизбежны изменения правил в сторону приоритета для безопасных автоматических летательных аппаратов под управлением централизованной автоматической системы управления воздушным движением.
Сотни проектов ЛА ВВП ищут пути решения транспортной проблемы. Прогресс в электронике вызвал бум активности, авиаэксперименты перестали быть смертельно опасными. Электроника способна заставить летать неустойчивые аппараты, но попытки получить качественно новый результат из комбинации традиционных узлов, обречены на два исхода: неудачный или традиционный.
Проблемы вертикального взлёта
Вертолёты для взлёта и полёта используют большие несущие винты (НВ), являются самыми энергетически эффективным из аэродинамических ЛА ВВП для режима длительного висения. Проблемы не только в низком аэродинамическом качестве горизонтального полёта. Вертолёт - технически сложный, а потому дорогой летательный аппарат, чрезвычайно сложный и в пилотировании. Высокая стоимость лётного часа, не допускает вертолёт на роль персонального ЛА.
Стоимость лётного часа – объективная комплексная интегральная оценка сравнения летательных аппаратов для коммерческого использования. Она отражает все параметры: стоимость аппарата, цену технического обслуживания, ресурс узлов, расход топлива, надёжность, безопасность, стоимость обучения пилота и страховки, аварийность и пр. Другие критерии и оценки (стоимость лётного километра, стоимость пассажирокилометра) легко арифметически выводятся из этого комплексного показателя.
Электроника подняла и дала право на жизнь разнообразным схемам БПЛА ВВП, не самым аэродинамически эффективным, но механически простым. Мультикоптеры поднимаются на нескольких пропеллерах фиксированного шага. Механически простая схема на малых массах и размерах поддаётся простому управлению контроллером, но энергетически неэффективна, имеет крайне низкое аэродинамическое качество, неприемлема для масштабирования до пассажирских перевозок. Увеличение размеров и массы упирается в системные проблемы: управление становится очень инертным, растёт чувствительность к ветру, низкий ресурс высокооборотных жёстких винтов в косом скоростном потоке делает их крайне опасными. Шумнее маршевого винта может быть только много перегруженных винтов с открытыми лопастями.
Конвертопланы взлетают на винтах изменяемого шага, поворачивающих плоскость вращения, допускают масштабирование до размеров Bell V-22 Osprey. Крыло в горизонтальном полёте даёт высокое аэродинамическое качество, но компромиссные винты проигрывают, и большим несущим, и эффективным маршевым. Плата за низкую энергетическую эффективность на режиме взлёта: большая мощность двигателей, шум перегруженных винтов, малая весовая отдача, высокая сложность конструкции при низкой надёжности. В итоге, цена аппарата и стоимость полёта выше вертолётной. Чрезвычайно высокая шумность не позволяет использовать конвертопланы вблизи населённых пунктов.
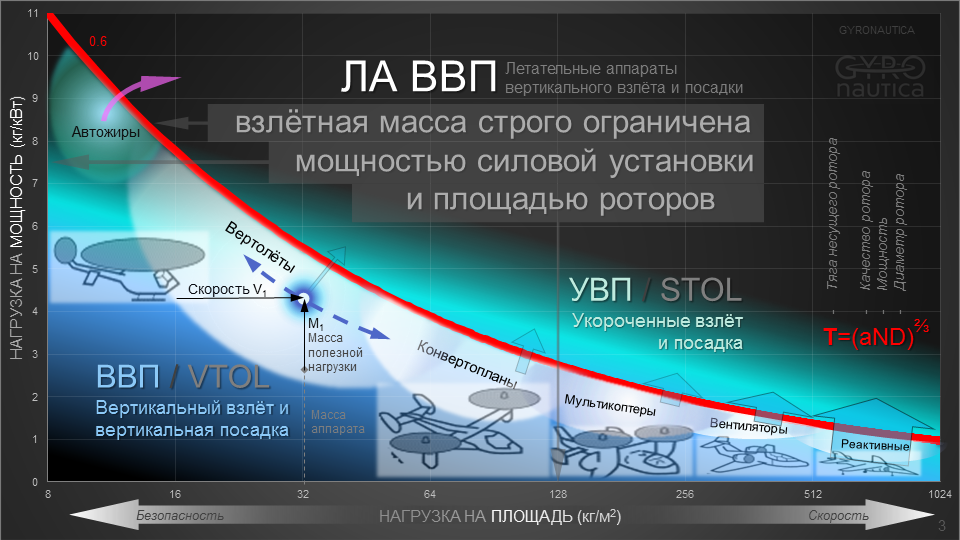
Рис.1 Энергетика вертикального взлёта (VTOL).
Можно сформулировать ряд необходимых условий для персонального ЛА ВВП с высоким энергетическим, весовым и аэродинамическим совершенством:
- Хороший летательный аппарат – летательный аппарат с высоким аэродинамическим качеством (К = вес/тяга = подъёмная сила/сопротивление). Низкое качество большого несущего винта в горизонтальном полёте Кмах.НВ= [7-9] ограничивает максимальное качество вертолётов и автожиров на уровне Кмах=[4.5], для сравнения, аналогичный показатель дозвуковых самолётов достигает 15-30.
- Функциональное разделение несущих и маршевых роторов неизбежно. Чем выше аэродинамическое качество ЛА ВВП, тем выше разность необходимой тяги и скорости потока через роторы на взлёте и в скоростном полёте. Не существует универсальных винтов способных эффективно работать на таких разных режимах. Для экономичного взлёта, особенно для безопасной вертикальной посадки нужен большой несущий ротор с большой тягой и с минимальной скоростью парашютирования. Для скоростного полёта необходим эффективный скоростной маршевый винт малого диаметра, с большим шагом и большой круткой лопастей.
- Необходимо повышение аэродинамического качества несущего ротора в скоростном полёте. Это самая важная и самая сложная комплексная проблема. Надо сокращать профильное сопротивление и диаметр несущего ротора, снижать скорость вращения в полёте. Попутно решить проблемы работы в разных режимах, прочностных ограничений скорости полёта, потери устойчивости, проблему вибрации, шума, сложной кинематики управления, …
- Повышение взлётных характеристик при сокращении диаметра несущего винта возможно за счёт многократного повышения пиковой мощности на взлёте. И это, действительно возможно, в строгом соответствии с законом сохранения энергии. Известен способ инерциального прыжкового взлёта автожиров [11].
От режима длительного висения можно отказаться, как от нерационального трюка шумного сжигания топлива с нулевым КПД. Здесь вертолёт является чемпионом, с остальными режимами полёта справляется хуже других ЛА.
- Летательный аппарат для пассажирских перевозок должен быть автоматическим, выполнять все режимы полёта (вертикальный взлёт, полёт по маршруту, точную вертикальную посадку) с надёжной, кратно дублированной системой управления.
- Есть ряд обязательных жёстких требований к ЛА, он должен быть предельно: безопасным, надёжным, всепогодным, малошумным, при этом, экономически рентабельным в производстве и эксплуатации, на уровне цен автомобиля.
Воздушное колесо
Крылья мешают вертикальному взлёту, несущий винт тормозит горизонтальный полёт. Необходимость вынести крыло из потока несущего винта при взлёте и снизить сопротивление ротора в скоростном полёте привела к соединению винта и крыла в одном устройстве. Гибрид похож на колесо, запатентованный ротор так и назван: воздушное колесо (ВК). Несущий ротор ВК имеет одну или две разнесённые втулки (рис.2), соединённые с единым внешним замкнутым крылом натянутыми, упругими на кручение лопастями.

Рис.2 Воздушное колесо с двумя втулками.
Замкнутое кольцеобразное крыло выполняет одновременно несколько функций:
- Конструктивный элемент прочности несущего винта.
- Крыло, создающее основную подъёмную силу в скоростном полёте.
- Массивный маховик, запасающий и выдающий энергию.
- Силовой гироскоп, стабилизирующий ЛА.
- Аэродинамический элемент гашения концевых потерь и шума.
Профилированное замкнутое крыло замыкает центробежные силы на себе и не передаёт их на втулку, соединяет внешние концы лопастей принимая знакопеременные нагрузки и моменты, действующие на лопасти. Лопасти, как спицы, натянуты между втулками и крылом. Концы лопастей получили опору и идеальную соконусность, исключены низкочастотные колебания и все нечётные гармоники. Внешнее замкнутое крыло даёт защиту лопастям не только от внешних помех (веток, проводов), но и от всех видов флаттера. Сокращаются концевые потери лопастей, исключено образование вихревых жгутов, исчезает шум.
Втулка разгружается от выламывающих нагрузок, исключены вертикальные и горизонтальные шарниры, а с ними опасные режимы и вибрация. Упрощается конструкция втулки, снижается масса управляемых элементов, шарнирные моменты и нагрузки в управлении шагом ротора. Возможны многороторные ЛА.
Снижено аэродинамическое сопротивление ротора, сняты прочностные ограничения увеличения скорости полёта. Имеем тонкое замкнутое крыло большого удлинения, натянутое центробежными силами, скоростной маховик, стабилизирующий ЛА, ёмкий накопитель энергии с мощным прямым бесшумным приводом непосредственно к лопастям, без редукторов, без трансмиссии, без реактивного момента, без длинной хвостовой балки, без рулевого винта.
Уменьшаются все потери: профильные, концевые, комлевые перетекания, неравномерность нагрузки, закрутка потока. КПД ротора приближается к «идеальному винту», на висении, на авторотации, в режиме ветряка.
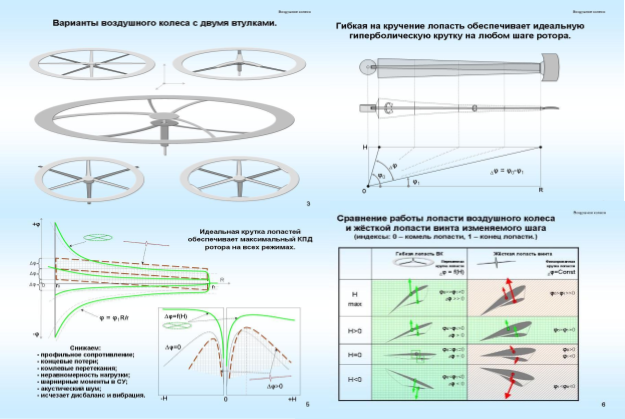
Рис.3 Воздушные колёса с двумя втулками и лопастями изменяемой крутки.
Несущий ротор воздушное колесо изменяемого шага с лопастями изменяемой геометрической крутки, способно эффективно работать в широком диапазоне на принципиально разных режимах по направлению потока через диск ротора: в пропеллерном, в вертолётном, на авторотации, в режиме ветроколеса. В скоростном горизонтальном полёте воздушное колесо работает с высоким аэродинамическим качеством (K>24) в режиме скольжения на оптимальных положительных углах атаки замкнутого крыла.
Автомеханическое маршевое воздушное колесо изменяемого шага с лопастями изменяемой крутки и цилиндрическим внешним крылом, позволяет обойти традиционные маршевые винты, и по эффективности, и по малошумности. Внешнее замкнутое крыло гасит концевые индуктивные потери лопастей, выполняет роль силового элемента, снимает нагрузки с втулки ротора.
Воздушное колесо допускает прямой привод на внешнее замкнутое крыло, выполняющего роль ротора обратимой электрической машины (двигателя, генератора, электрического тормоза, противообледенительного индуктивного нагревателя, дополнительной электромагнитной опоры ротора). Такой «внешний привод» на крыло ВК в двухроторной поперечной схеме снижает сопротивление, внутренние сегменты крыла, идущие в направлении полёта, не взаимодействуют с встречным скоростным потоком, экранированы фюзеляжем с секторным статором электропривода – электромагнитной опоры ротора.
Геометрия замкнутого крыла
Профиль кольцеобразного крыла продувается в противоположных направлениях, а потому имеет симметричный обоюдоострый профиль. Профиль плоского кольца можно формировать зеркальным отображением хвостовой части крыльевого профиля, например, из плосковыпуклых профилей (Clark-Y, ЦАГИ-719, ЦАГИ-831, …). Возможны более оптимальные профили и величины конусности.
Удлинение замкнутого кольцеобразного крыла рассчитывается по известной универсальной формуле для крыльев сложной формы с переменной хордой:
λ = L / bср = L2/S (1)
, где L = D = 2R – размах крыла, S – площадь крыла.
Для плоского кольцеобразного крыла с внешним радиусом R и внутренним r, удлинение удобнее рассчитывать через относительную ширину кольца (r/R). Подставив в (1) S =π R2 - π r2 =πR2 (1-(r/R)2) получаем формулу расчёта удлинения
λ = 4 / (π (1- (r/R)2)) (2)
В двухроторной поперечной схеме удлинение несущей системы удваивается:
λ ≈ 8 / (π (1- (r/R)2)) (3)
Приведённые формулы справедливы для расчёта удлинения крыла ВК в целом. Формально, при (r/R)>0.9 тонкое кольцеобразное крыло уже нельзя считать одним крылом с удвоенной хордой, это два отдельных крыла с большим продольным разносом, более десяти средних аэродинамических хорд (САХ), удвоенного удлинения:
λ = 16 / (π (1– (r/R)2)) (4)
Например, замкнутое кольцеобразное крыло диаметром 2.5м шириной b=75мм (r/R=0.94) в двухроторной поперечной схеме имеет площадь S=1.14м2 и интегральное удлинение λ=21.9 в тандеме из двух крыльев с удлинением λ=43.75.
Крыло ВК способно иметь экстремальные значения удлинения, недоступные фиксированным крыльям, которые при больших удлинениях λ>10 теряют жёсткость, а на срывных режимах теряют устойчивость, валяться в штопор.
Замкнутые кольцеобразные крылья не боятся срывов, не теряют устойчивость, парашютируют без сваливания. Узкое крыло, натянутое центробежными силами, может иметь толщину профиля менее 10%, без ущерба для прочности. Тонкое, гладкое, монолитное замкнутое крыло ВК имеет минимальное профильное сопротивление, большое удлинение λ обеспечивает минимальное индуктивное сопротивление: Сxi = Cy2 / πλ, два ключевых условия достижения высокого аэродинамического качества: K= Cy/Cx >24.
Аэродинамика воздушного колеса
Замкнутое плоское кольцеобразное профилированное крыло имеет интересную аэродинамику в статике и уникальную в динамике. Кольцо условно можно разбить на четыре характерных сегмента, «передний», «задний», «отступающий» и «наступающий». Передний и задний сегменты кольца образуют крылья, соответственно, прямой и обратной переменной стреловидности.
Моделирование обтекания фиксированного кольца показало: основную долю подъёмной силы эффективно создают передние и задние сегменты, образующие тандемный биплан с двумя крыльями большого удлинения, с большим продольным разносом. Боковые сегменты сокращают индуктивные потери, гасят концевые перетекания. Таким образом, на малых относительно потока линейных скоростях вращения, фиксированное кольцеобразное крыло приближено к идеальному – эллиптическому, с высоким значением коэффициента Освальда.
Рис.4 Подъёмная сила фиксированного кольцеобразного крыла.
Аэродинамика фиксированных и вращающихся тел имеет качественные различия. Пример, цилиндр, неудобообтекаемый в статике, при вращении с коэффициентом Ωr/v= [0.2-4.5] способен создавать значительную подъёмную силу Су = [0.2–0.6]. Эффект Магнуса имеет практическое применение.
Профилированное кольцо - удобообтекаемое эффективное замкнутое крыло, в динамике особенно интересно, значится в Книге рекордов Гиннесса, как запускаемый человеком предмет с максимальной дальностью полёта (383.13м, Скотт Зиммерман, 8.7.1986г). ВК не теряет устойчивость, способно побить рекорд.
Неожиданным, неочевидным, но закономерным, был факт, что основную долю подъёмной силы вращающегося кольцеобразного крыла, большую, чем эффективные передние и задние сегменты, создаёт соединяющий их внешний сегмент, идущий по потоку с минимальной относительной скоростью, а, следовательно, с минимальным локальным сопротивлением трения Сх → 0.
Когда линейная скорость вращения выше скорости потока (µ= v/Ωr <1), вектор сил аэродинамического трения меняет направление, локальное сопротивление становится отрицательным Сх<0. Над отступающим сегментом вращающегося замкнутого крыла образуется область высокого разрежения, при отсутствии пограничного слоя и инверсии градиента скоростей, локальный коэффициент подъёмной силы Су значительно (до 2.5-3 раз?) превышает показатели подъёмной силы фиксированного крыла. Аналогично эффекту Магнуса и эффекту Коандэ, работает аэродинамика управляемого пограничного слоя.

Рис.5 Аэродинамическое качение ВК.
Новый аэродинамический эффект ВК – «эффекты аэродинамического качения» проявляется асимметричной подъёмной силой при обтекании потоком замкнутого профилированного вращающегося крыла на его отступающих и наступающих сегментах в широком диапазоне углов атаки, чисел Рейнольдса и коэффициентов вращения µ = v/ΩR = [0.1 – 10].
В монографии по теоретической аэродинамике [4] подробно описаны и даны ссылки на эксперименты ещё 20-х годов прошлого столетия [8], [9] с крыльевыми профилями с подвижной верхней поверхностью, меняющей направление циркуляции, где экспериментально доказано: Су может достигать значений ≈3.73 при угле атаки в 55º, а бессрывные режимы обтекания возможны на углах атаки вплоть до 105º.
В аналогии с традиционным колесом имеем новый движитель и качественно новый способ эффективного получения подъёмной силы, замену большого сопротивления трения фиксированного крыла на минимальное сопротивление аэродинамического качения. Аэродинамика воздушного колеса даёт возможность получения высокого аэродинамического качества (К=Су/Сх) в устойчивом полёте на высоких скоростях. Запас подъёмной силы наступающих лопастей уравновешивает высокая подъёмная сила отступающего сегмента.

Рис.6 Режим авторотации ВК в двухроторной поперечной схеме.
У ротора воздушное колесо есть новый режим самовращения на высокой скорости полёта с малыми углами атаки плоскости ротора, где активно участвует внешнее крыло. Это новый вид авторотации с большим коэффициентом режима работы ротора µ>1, когда линейная скорость вращения на периферии несущего ротора ниже скорости полёта, а внутренние сегменты крыла выведены из потока идут внутри центроплана. Самовращение поддерживает натяжение крыла, сокращает сопротивление трения. Эффект близок к известным аналогам: роллерон, безлопастная турбина пограничного слоя или турбина Тесла.
Воздушное колесо открывает новые применения и возможности масштабирования, способно дать новые решения проблем авиации, от минимальных, до сверхзвуковых скоростей полёта. Компьютерное моделирование сложного трёхмерного обтекания вращающегося воздушного колеса сопряжено с большой сложностью и ограниченной точностью без опоры на результаты натурных испытаний. Новые аэродинамические эффекты нуждаются в углублённых экспериментальных исследованиях, точных измерениях, для построения адекватных математических моделей, оптимизации профилей и геометрических параметров аэродинамических элементов воздушного колеса.
Новые аэродинамические эффекты обнаружены экспериментально на стендах и подтверждены на летающих моделях. Новый режим авторотации и аэродинамического качения был реализован и изучался на безмоторных привязных летательных аппаратах двухроторной поперечной схемы, на аппаратах с четырьмя несущими воздушными колёсами. Отработка режимов полёта проводится на летающих телеуправляемых моделях.

Рис.7 Летательные аппараты на несущих роторах воздушное колесо.
Гиростабилизированный летательный аппарат
Силовая гироскопическая стабилизация широко применяется в технике для стабилизации объектов, от лёгких видеокамер, до крупных судов (гироскопические успокоители качки). Четыре скоростных гиродина массой по 300кг управляют ориентацией орбитальной МКС массой более 417 тонн.
Задача создания всепогодного летательного аппарата с энергетически эффективным вертикальным взлётом и безопасной посадкой, в сочетании с высоким аэродинамическим качеством в скоростном горизонтальном полёте имеет решение для реализации на современном уровне развития технологий.
Гиролёт – гиростабилизированный летательный аппарат с несущими роторами воздушное колесо. Новый вид ЛА ВВП с новыми несущими роторами относится к классу винтокрылов в русскоязычной терминологии, в англоязычной терминологии - гиродины (gyrodin, heliplan, compound gyroplane,…), с 1953 года выделены международной федерацией аэронавтики FAI в отдельный класс Е-2.
Большие несущие винты изменяемого шага (ВИШ), в отличие от жёстких винтов фиксированного шага (ВФШ) мультикоптеров, обладают кратно большими моментами инерции и гироскопическими моментами. Все винтокрылые летательные аппараты (и вертолёты, и автожиры) изолируются от гироскопических моментов несущих винтов горизонтальными шарнирами, дающими лопастям свободу взмаха, разгружающими втулку от выламывающих нагрузок, позволяющими наклонять конус вращения винта. Компенсаторы взмаха корректируют циклический шаг лопастей приводят положение конуса вращения несущего винта к соосному положению с валом исключительно аэродинамическими силами. Таким образом, винтокрылы не опираются на несущие винты, более того, передача неуравновешенного момента на сложную шарнирную конструкцию ротора чреват рядом опасных режимов, например «земной резонанс».
Структурно прочные относительно вала роторы воздушное колесо не имеют шарниров (и вибрации), при равной массе с несущими винтами обладают в 3-5 раз большим моментом инерции и гироскопическими моментами, с которыми уже бесполезно бороться, но можно рационально эффективно использовать. Принципиальное свойство гиролётов - упруго-жёсткая механическая фиксация плоскостей вращения структурно прочных роторов ВК, опора на гироскопы и эффективное управление углами атаки замкнутого крыла с помощью гироскопических моментов.
Силовая гироскопическая стабилизация гиролётов по крену и тангажу не зависит от скорости полёта, эффективно гасит знакопеременные возмущения при полёте в турбулентном потоке. Принципиальное отличие силовой гироскопической стабилизации от аэродинамической стабилизации в том, что она не находится в противоречии с управляемостью летательного аппарата, сохраняет свободу поворота по курсу и по крену.
Гиролёты двухроторной поперечной схемы с направлением вращения роторов, где внешние сегменты идут по потоку, обладают и надёжной аэрогиродинамической стабилизацией. Внешние возмущения по крену автоматически отыгрываются гироскопическими моментами под 90°, изменяющими углы атаки плоскостей вращения роторов, восстанавливающими исходное положение гиролёта. Гиролёт поперечной схемы надёжно стабилизируется в турбулентном потоке без вмешательства пилота и системы управления.
Радиоуправляемые
пилотажные
модели
вертолётов со
сложной
кинематикой
управления
общего и
циклического
шага лопастей
демонстрируют
экстремальную
акробатику
3D-пилотажа.
Найти
рациональное
практическое
применение
опасному
качеству
пилотажных
вертолётов
пока не
удаётся.
Гиролёты
совершенее
вертолётов,
способны
летать
быстрее,
поднимать
больше,
перевозить
дальше, демонстрируют
высокую
стабильность при
порывистом
ветре.
Всепогодный ЛА
ВВП с роторами
ВК, вне
конкуренции
для
практического
применения:
как стабильная
платформа
качественной
видеосъёмки,
для комфортных
пассажирских
перевозок.
Гиролёт с несущими роторами ВК и маршевыми винтами снимает вертолётные ограничения скорости полёта: энергетические, аэродинамические и прочностные. Инерциальный вертикальный взлёт и посадка (IVTOL) отвязывает взлётную массу от мощности двигателей раскрутки ротора, позволяют сократить диаметр и сопротивление в скоростном полёте.
Тонкие лопасти с тонким замкнутым крылом натянуты центробежными силами имеют малое профильное сопротивление, обеспечивают высокое аэродинамическое качество. ВК не теряет равновесие в скоростном полёте, в широком диапазоне коэффициента режима работы несущего воздушного колеса, запас подъёмной силы наступающих лопастей уравновешивает высокая подъёмная сила отступающего сегмента крыла.
Структурно прочный ротор ВК с двумя разнесёнными вдоль оси втулками образует прочный двухрядный винт с фиксированной плоскостью вращения крыла относительно вала. Прочное воздушное колесо снимает «родовое проклятие» несущих винтов – вибрацию, даёт свободу проектирования ЛА ВВП многороторных схем, позволяет в полёте снижать обороты и сопротивление, снимает прочностные ограничения увеличения скорости полёта.
Воздушное колесо даёт широкий простор реализации разных схем гиролёта.
Возможен двухроторный гиролёт поперечной схемы (transverse twin-rotor gyrocraft) с двумя несущими роторами воздушное колесо, с одним/двумя маршевыми толкающими/тянущими винтами. Несущие роторы оптимизированы исключительно под создание подъёмной силы, специальные маршевые винты эффективно создают тягу в скоростном горизонтальном полёте. Вертикальные оси вращения несущих роторов установлены жёстко на концах короткой балки крыльевого профиля. Силовая гироскопическая стабилизация придаёт гиролёту уникальную устойчивость и всепогодность.
Гиролёт двухроторной поперечной схемы с устойчивой аэродинамикой, имеет ряд важных технологических преимуществ перед однороторной схемой:
- Два ротора противоположного вращения нейтрализуют реактивные моменты, допускают висение и низкоскоростной вертолётный режим полёта.
- Силовая гироскопическая стабилизация ЛА обеспечивает всепогодность, без проблем гашения ассиметричной вредной прецессии в однороторной схеме.
- Двухроторная поперечная схема имеет большое удлинение, минимальное индуктивное сопротивление и высокое аэродинамическое качество,
- - обладает автоматической аэрогиродинамической стабилизацией,
- - наиболее устойчива против опасного режима «вихревое кольцо».
- Два несущих ротора технически проще, имеют управление только общим шагом, освобождаются от сложного автомата перекоса.
- Упрощённая система управления, даёт возможность создания надёжного и безопасного автоматического летательного аппарата.
- Допускается ручное пилотирование гиролёта, возможен полёт без автоматики.
- Сокращаются габариты ЛА на стоянке, при транспортировке в сложенном состоянии.
- Каждый ротор в два раза легче, в полтора раза компактнее, чем для однороторного варианта, вписывается в габариты стандартного контейнера.
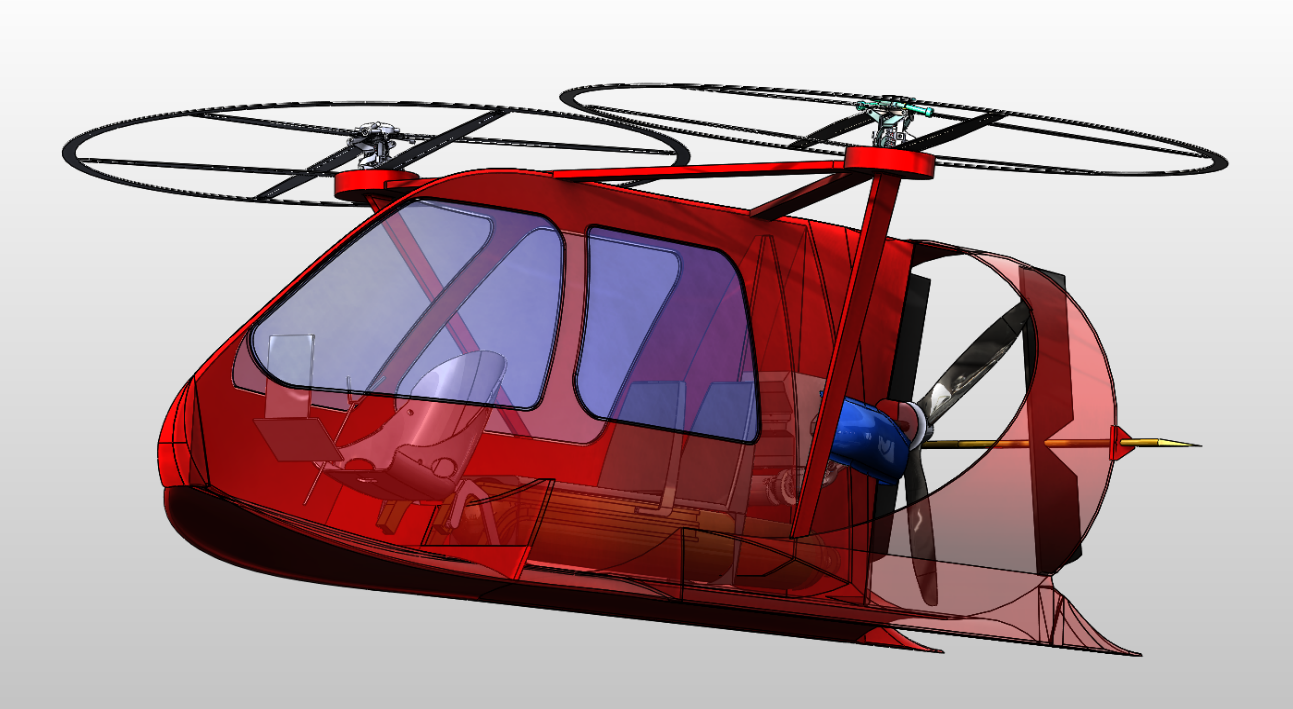



Рис.8 Гиролёты поперечной схемы (transverse twin-rotor gyrocraft).

Рис.9. Проблемы инерциального вертикального взлёта на винтах.
Инерциальный вертикальный взлёт
Взлёт - наиболее энергозатратный и сложный режим для всех летательных аппаратов. Вертикальный взлёт требует многократно большей мощности, чем аэродромный старт. Лучше вертикального взлёта вертолёта, может быть только – всепогодный, устойчивый, малошумный, быстрый, экономичный инерциальный вертикальный подъём. Именно такой взлёт дают роторы воздушное колесо.
Воздушное колесо – ёмкий кинетический накопитель [1] высокой мощности с высоким КПД и неограниченным числом циклов заряда/разряда. Перед взлётом энергия закачивается в маховики, воздушные колёса разгоняются до высоких оборотов, тонкие лопасти установлены на шаг нулевой подъёмной силы, принимают нулевую крутку, создают минимальные потери и шум. Прочные в плане сбалансированные колёса отличаются от шарнирных несущих винтов отсутствием вибрации, исключают опасный режим «земной резонанс».
Первый этап взлёта - предварительная раскрутка воздушных колёс происходит на земле. Возможна, как автономная раскрутка от силовой установки гиролёта, так и от внешнего источника электрической энергии на оборудованной площадке взлёта. Второй способ старта не только наиболее экономичен, но и малошумен, что позволит широко использовать гиролёт в населённых пунктах.
Высокая механическая прочность кольца на растяжение позволяет производить раскрутку воздушных колёс до высоких оборотов, пока концы лопастей имеют дозвуковую скорость, u0 = ΩR < 0.9М < 300м/с. Два маховика - плоские кольца, массой по 25кг, способны набрать большую кинетическую энергию:
А = m u02 / 2 = 50кг * (296м/с)2 / 2 = 2.2 МДж = 0.61 кВт*ч (5)
При автономном старте двигатель силовой установки ЛА мощностью 60 кВт совершает эту работу примерно за минуту, с учётом потерь. Реактивные моменты двух роторов противоположного вращения полностью компенсируются. Располагаемая энергия, при снижении от максимальных стартовых оборотов колёс u0, до полётных (u1 ~ 90 м/с) составляет около 90%:
А = m (u02 – u12) / 2 = 2.2 МДж – 0.2 МДж = 2 МДж (6)
Второй этап взлёта – быстрый, малошумный инерциальный подъём.
У раскрученных роторов гиролёта вся энергия подведена непосредственно к лопастям, изменяя общий шаг лопастей можем снимать высокую мощность с маховиков, независимо от мощности приводов предварительной раскрутки роторов.
Располагаемая мощность гиролёта на старте многократно (на порядок) превышает номинальную мощность маршевой силовой установки. При относительной массе маховиков воздушных колёс m/M=0.1 (около 10% от взлётной массы ЛА) запасённой энергии хватает для быстрого вертикального подъёма на большую высоту H, без участия двигателя и трансмиссии, с высоким КПД η~0.3…0.5, малыми индуктивными потерями и минимальным шумом:
H = η (u02 – u12) m / 2 M g = 0.4 (2902 – 902) / 200 = 152 метра (7)
Инерциальный вертикальный взлёт (ИВВП, IVTOL) возможен с большой вертикальной перегрузкой, если ограничится комфортным значением до 2.5g, допустимым по нормам гражданской авиации, подъём будет длиться 15-16 секунд. Из них 3-5 секунд равномерного вертикального ускорения до +1.5g переходящие в 10-12 секунд плавного подъёма с вертикальным замедлением и горизонтальным ускорением на взлёте по параболе. Есть возможность взлетать быстро, высоко, с большей перегрузкой или плавнее, дольше, полого.
Высокая стартовая скорость вращения роторов, позволяет получить высокие пиковые значения нагрузки на площадь и, соответственно, тяги, на относительно небольших роторах ВК, при близких к вертолётным коэффициентах заполнения σ.
После отрыва от земли подвод мощности переключается с раскрутки несущих роторов ВК на маршевый винт, взлёт гиролёта происходит по крутой параболе. Мощность маршевого двигателя суммируется к энергетике инерциального взлёта, расходуется на быстрый набор крейсерской скорости.

Рис.10 Энергетика инерциального вертикального взлёта (IVTOL).
Гиролёт – ЛА ИВВП, не имеет жёсткого ограничения взлётной массы, массы полезной нагрузки, предельной высоты базирования над уровнем моря. Гиролёт способен энергично вертикально взлетать, летать и вертикально садиться с большой полезной нагрузкой, которую не в состоянии держать на длительном висении, ни он, ни вертолёт, никакой иной ЛА ВВП аналогичной мощности. Увеличение взлётной массы, обратно пропорционально снижает максимальную высоту инерциального подъёма, сокращает диапазон доступных скоростей полёта. Гиролёт способен иметь высокую для летательных аппаратов весовую отдачу. Ни высокогорье, ни пыльные площадки пустынь не являются помехами для надёжного и энергичного вертикального инерциального подъёма (IVTOL).
Энергии роторов достаточно для вертикального подъёма с уровня земли в условиях плотной высотной городской застройки. Парковка на крышах зданий удобна и выгодна с точки зрения энергетики, безопасности, экологии и урбанистики. Свободный ресурс ценного парковочного пространства ждёт активного освоения.
Инерциальная вертикальная посадка
Всепогодная надёжная управляемая мягкая посадка в автоматическом режиме - ключевой фактор безопасности полётов над населёнными пунктами.
Жёсткие лопасти винтов имеют фиксированную крутку, оптимальную для одного фиксированного режима. Фиксированный угол установки и нулевая крутка лопастей автожира оптимальны для поддержания авторотации, но ротор медленно набирает обороты. Вертолётные лопасти имеют отрицательную крутку оптимальную, только, для режима висения, любые изменения шага значительно снижают КПД. Несущий винт вертолёта без привода быстро теряет обороты, плохо авторотирует. Несущие винты имеют низкое аэродинамическое качество.
Воздушные колеса изменяемого шага с адаптивными упругими лопастями изменяемой геометрической крутки (приближенной к идеальной - гиперболической) позволяют максимально расширить рабочий диапазон с разным направлением потока, работать на принципиально разных режимах: в пропеллерном, в вертолётном, в плоском скольжении, на авторотации, в режиме ветроколеса, всегда с равномерной нагрузкой на ометаемую площадь, без лишних индуктивных потерь, с минимальным шумом, с максимальным КПД.
Перед посадкой гиролёт снижает обороты маршевого винта, может переключить свободную мощность на разгон несущих роторов. При подлёте к выбранной точке посадки, несущие роторы ВК способны собирать, экономно рекуперировать, кинетическую и потенциальную энергию аппарата. Малые полётные обороты несущих колёс позволяют плавно изменить тангаж гиролёта, увеличить угол атаки плоскостей вращения, выставить большие отрицательные углы установки и положительную крутку лопастям, перевести роторы в режим ветроколёс, раскручивать маховики до высоких посадочных оборотов.
Только адаптивные упругие лопасти несущих роторов ВК способны менять одновременно шаг и крутку, позволяют собирать энергию потока в режиме ветроколеса с КПД близким к максимально возможному, накапливать большие объёмы в маховиках, а затем, в вертолётном режиме возвращать лопастям энергию с высокой мощностью и с минимальным шумом.
Так, кинетическая энергия тела, летящего со скоростью v=80м/с, равна его потенциальной энергии на высоте h=320м. Полная располагаемая энергия аппарата массой M=500кг составит внушительную величину:
E = К + Р = Mv2/2 + Mgh = 1.6 МДж + 1.6 МДж = 3.2 МДж (8)
Маховики несущих роторов суммарной массой 50 кг (~10% полётной массы гиролёта), способны принять до 2МДж. Максимальный теоретический КПД ветроколеса η=0.59. На практике реально собрать 1/3 от располагаемой энергии, достаточно набрать 1МДж. Воздушные колёса обеспечат необходимую энергию для гашения скорости с высокой пиковой мощностью и запас на 5-10 секунд малошумного вертолётного режима ~100кВт. Запас энергии в роторах и возможность управляемой мягкой вертикальной посадки без участия двигателя позволяет выбрать безопасную площадку.
Автоматическая системы управления по координатам точки посадки и положения гиролёта, дублированных данными лазерного дальномера, с учётом полётной массы, с поправками на направление и силу ветра, способна построить и точно выполнить оптимальную траекторию спуска.
Если пилоту автожира удобно проводить посадку на минимальной скорости снижения, успевая парировать управлением порывы ветра, то электронному контроллеру гиролёта удобнее проводить снижение на более высокой скорости, с минимальной чувствительностью к случайным факторам атмосферной турбулентности.
После перевода энергии гиролёта в маховики несущих колёс, вся запасённая энергия подведена к лопастям. Воздушные колёса на высокой скорости вращения способны выдать большую мощность за короткое время, чтобы гасить скорость снижения. Перегрузка на торможении ограничивается комфортным для пассажиров значением. Аэродинамика воздушных колёс в двухроторной поперечной схеме наиболее устойчива против опасности образования вихревого кольца.
Силовая гироскопическая стабилизация и большая располагаемая мощность роторов обеспечивают устойчивость гиролёта и стабильность траектории. Дифференциальное управление шагом несущих роторов вызывает поперечное смещение с минимальным креном. Небольшие корректирующие моменты тяги дают продольную коррекцию траектории к заданной точке посадки. Отклонение управляемого хвостового оперения и вектора тяги маршевого привода, обеспечивают точное выравнивание по курсу и продольную управляемость аппарата. Точная мягкая посадка гиролёта с минимальной скоростью происходит на задние концы лыж-рессор с последующим плавным выравниванием. В шторм, только гиролёт способен прижаться к посадочной площадке, качающейся палубе, без опасности перехлёста винтов или отрубания хвостовой балки.
Инерциальная автоматическая мягкая посадка гиролёта в точку с заданными координатами – детерминированный рутинный процесс, на уровне сложности автоматической парковки автомобиля. Всепогодность и надёжность автоматической мягкой посадки гиролёта - гарантия безопасности.
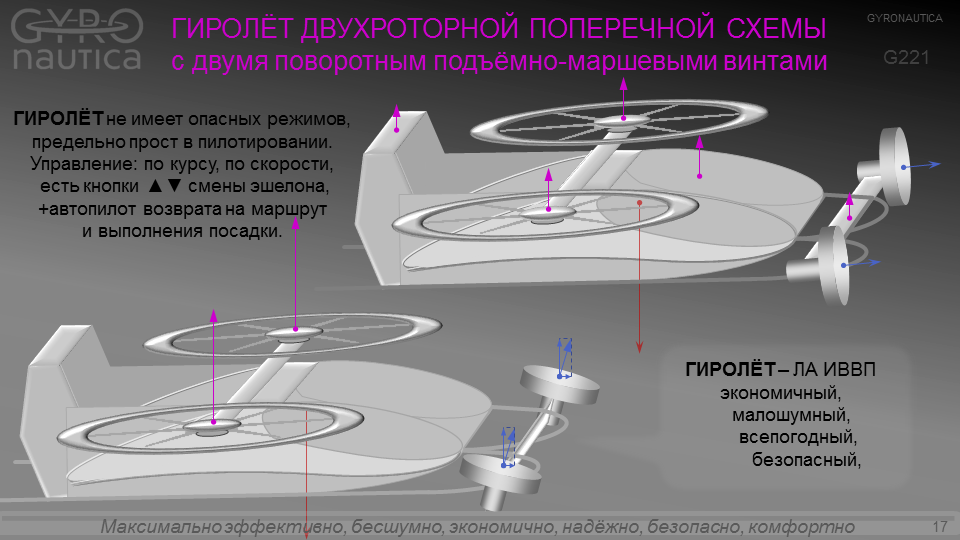
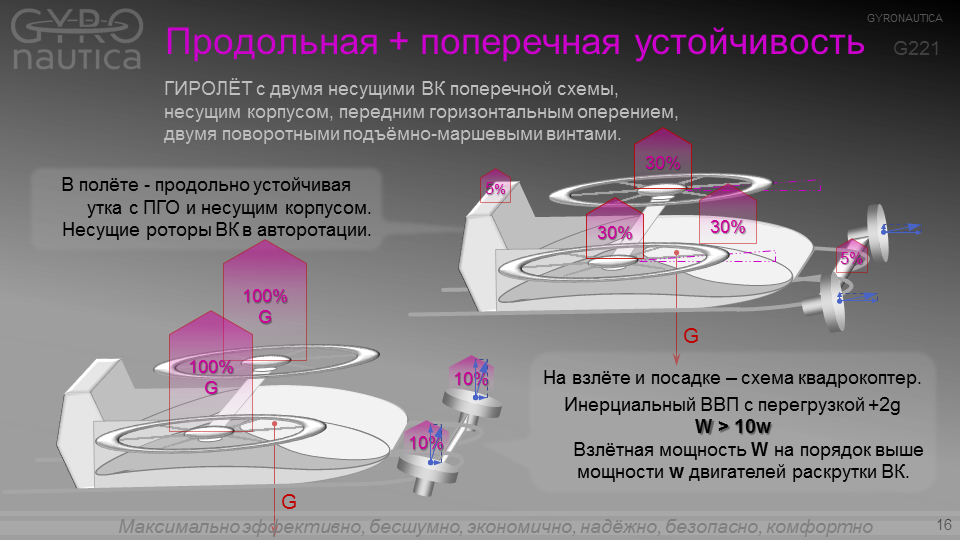
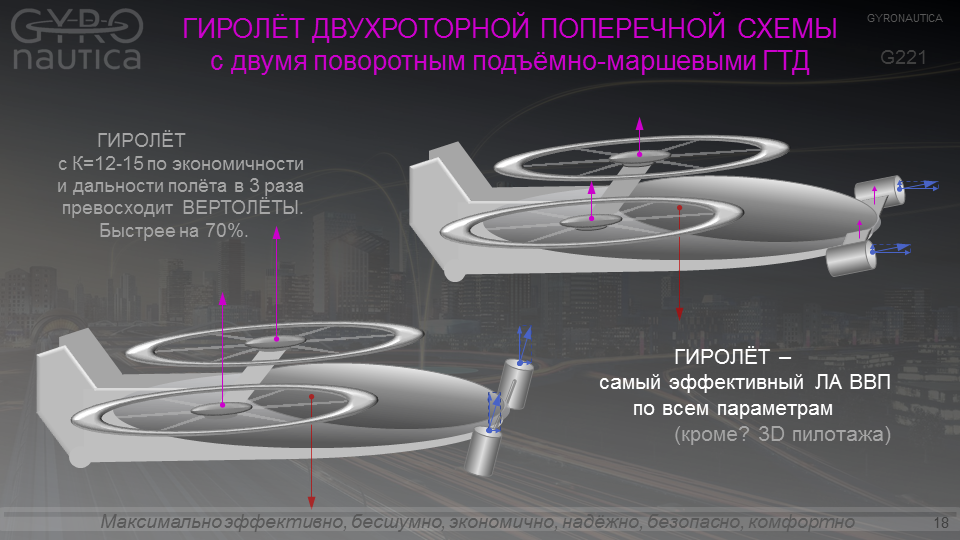
Рис.11 Гиролёт с двумя несущими и двумя подъёмно-маршевыми роторами.
Горизонтальный полёт
Гиролёт способен иметь широкий диапазон доступных скоростей горизонтального полёта в плотной тропосфере, выше других известных типов аэродинамических ЛА с той же мощностью силовой установки.
На вертолётных режимах, на малых скоростях полёта, при высоких оборотах несущих роторов, в создании подъёмной силы активно участвуют лопасти воздушных колёс и толкающий маршевый винт управляемого вектора тяги (Рис.8). Гиролёт на Рис.11 на вертолётном режиме близок к квадрокоптеру, в горизонтальном полёте обладает более эффективной схемой с более высоким энергетическим и аэродинамическим качеством.
В горизонтальном полёте воздушные колёса в режиме авторотации с работающими лопастями аналогичны сплошному крылу равной площади ометаемой роторами, в двухроторной поперечной схеме удлинение λmin=8/π=2.55.
Для полёта на крейсерской скорости до 800 км/ч достаточную горизонтальную тягу способны дать только эффективные маршевые винты.
С увеличением скорости полёта растёт подача мощности на маршевые винты, снижается мощность приводов на несущие роторы, поддерживаются минимальные обороты достаточные для натяжения кольцеобразного крыла. Несущие роторы работают на малых положительных углах атаки, в режиме аэродинамического скольжения снижают скорость вращения, лопасти разгружаются, выполняют роль подвижных управляющих элементов, а подъёмную силу создают узкие тонкие кольцеобразные крылья большого удлинения, натянутые центробежными силами. В отличии от вертолётов и мультикоптеров, в создании подъёмной силы гиролёта участвуют профилированная крыльевая балка (Рис.8), несущий корпус (Рис.11).
Площадь внешнего замкнутого крыла ВК задаётся оптимальной, из расчёта полёта на угле максимального аэродинамического качества αКmax на высокой крейсерской скорости. У самолётов и других ЛА, полёт с углом атаки крыла α < αКmax (I режим) и α > αКmax (II режим) смыкаются в одной точке на диаграмме Жуковского (Пено). Воздушное колесо способно менять общий шаг, управлять участием и исключать лопасти из процесса создания подъёмной силы, структурно прочный ротор позволяет снижать скорость вращения, таким образом в 10 раз сокращается эффективная несущая площадь в полёте, и в 10 раз растёт удлинение несущей системы λ>22, равняется удлинению замкнутого крыла в двухроторной поперечной схеме (3). Во всём этом широком диапазоне несущая система гиролёта работает c углом максимального аэродинамического качества αКmax. Гиролёт имеет наиболее широкий диапазон экономичных скоростей полёта (до 70% от доступных), от скорости максимального времени полёта, до, в 3-3.5 раза более высокой крейсерской скорости полёта на максимальную дальность. Форсированный I-режим скоростного полёта и вертолётный II-режим далеко разнесены за пределы широкого диапазона экономичных скоростей гиролёта.
Максимальная скорость
ВК снимает прочностные и аэродинамические ограничения увеличения скорости полёта гиролёта, скорость ограничена тягой маршевой силовой установки. Аэродинамику гиролёта поперечной схемы портят втулки роторов и электроприводы раскрутки. Воздушное колесо допускает прямой электромагнитный привод на внешнее замкнутое крыло. Секторный электропривод ВК может быть размещён внутри фюзеляжа, так выводится из потока наступающий сегмент замкнутого крыла, сокращается сопротивление, поднимается аэродинамическое качество. Есть резервы сокращения сопротивления ВК, используются обтекаемые аэродинамические тарелки втулок и обтекатели валов.
Попытка увеличить максимальную скорость полёта, попытаться ещё сократить сопротивление, заменить тонкое гладкое замкнутое крыло ВК с малым сопротивлением аэродинамического качения, на фиксированное крыло с механизацией равной площади и удлинения с более высоким трением скольжения – малоперспективна и абсолютно непрактична. В результате получим уже не самолёт, а крылатую ракету с минимальным крылом и крайне узким диапазоном скоростей полёта, не способную взлетать и приземляться.
Прочное воздушное колесо с двумя разнесёнными втулками позволяет гиролёту на высокой скорости полёта снижать скорость вращения роторов. Отношение скорости полёта к линейной скорости вращения концов лопастей выражает коэффициент режима работы несущего винта µ = V/ΩR.
Вертолёты летают с µ < 0.35, винтокрыл CarterCopter [11] с большим фиксированным крылом и двухлопастным несущим винтом с массивными лопастями способен летать на режиме µ = 0.87. Структурно прочные воздушные колёса гиролёта допускают большие коэффициенты режима работы ротора µ > 1, когда линейная скорость вращения на периферии ВК ниже скорости полёта.
Отсутствие у воздушного колеса системных ограничений увеличения скорости (вибрации, прочностных ограничений, опасности потери устойчивости) в сочетании с высоким аэродинамическим качеством на высоких скоростях полёта, позволяет говорить о гиролёте как о самом энергетически эффективном ЛА (не только среди ЛА ВВП) для полётов в плотной тропосфере.
Устойчивость
При высоких оборотах роторов воздушное колесо доминирует силовая гироскопическая стабилизация, маховики роторов ВК гасят знакопеременные возмущения, обеспечивают всепогодность гиролёта на взлёте, при посадке и на малых скоростях полёта. Силовая поперечная и продольная гиростабилизация оставляет свободу управления по курсу с малым моментом инерции.
Высокую поперечную устойчивость гиролёта поперечной схемы в горизонтальном полёте обеспечивает автоматическая аэрогиродинамическая стабилизация. Внешние возмущения по крену передаются на вал ротора ВК, автоматически отыгрываются гироскопическими моментами под 90°, изменяют углы атаки плоскостей роторов с крылом, восстанавливают исходное положение. Гиролёт в турбулентном потоке надёжно стабилизируется благодаря малой упругой деформации роторов, точного упругого скручивания балки крыла без вмешательства пилота и системы управления. Роторы «дышат», гиролёт исключительно стабилен при порывистом ветре, как привинченный.
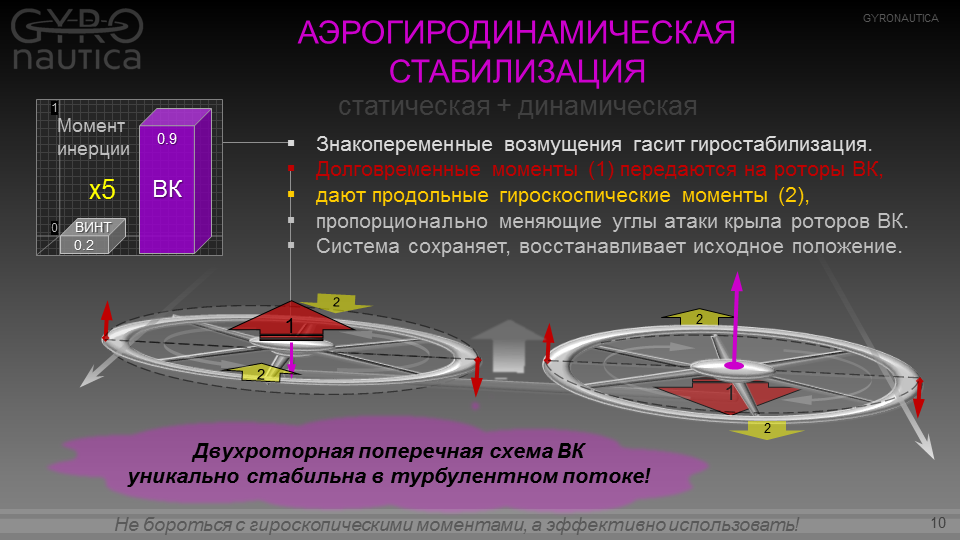
Рис.12 Аэрогиродинамическая стабилизация.
Гиролёт на Рис.12 с флюгерным передним горизонтальным оперением (ФПГО) обладает аэродинамической продольной устойчивостью. Высокая продольная устойчивость даёт широкий диапазон допустимой центровки.
Управляемость
Принципиально важно, что силовая гироскопическая стабилизация, в отличии от аэродинамической, не находится в противоречии с управляемостью. Гиролёт поперечной схемы с дифференциальным управлением общим шагом несущих роторов обеспечивает поперечное управление, и линейное скольжение, и изменение углов крена. Причём, на висении и при крутом парашютировании с высокими оборотами несущих роторов происходит боковое скольжение с минимальным креном, удобное для выполнения точной посадки.
В скоростном горизонтальном полёте, независимо от скорости вращения роторов ВК, происходит эффективное управление креном гиролёта, как реакция на согласованное изменение углов атаки плоскостей вращения несущих роторов. Управление общим шагом несущих роторов ВК, избыток подъёмной силы наступающих лопастей, идущих против потока, образует смещённые на 90° гироскопические моменты и точные дозированные изменения углов атаки плоскостей вращения воздушных колёс, создающие управляемый крен. Крен позволяет сократить радиусы горизонтального манёвра, позволяет совершать устойчивые скоординированные повороты и форсированные развороты.
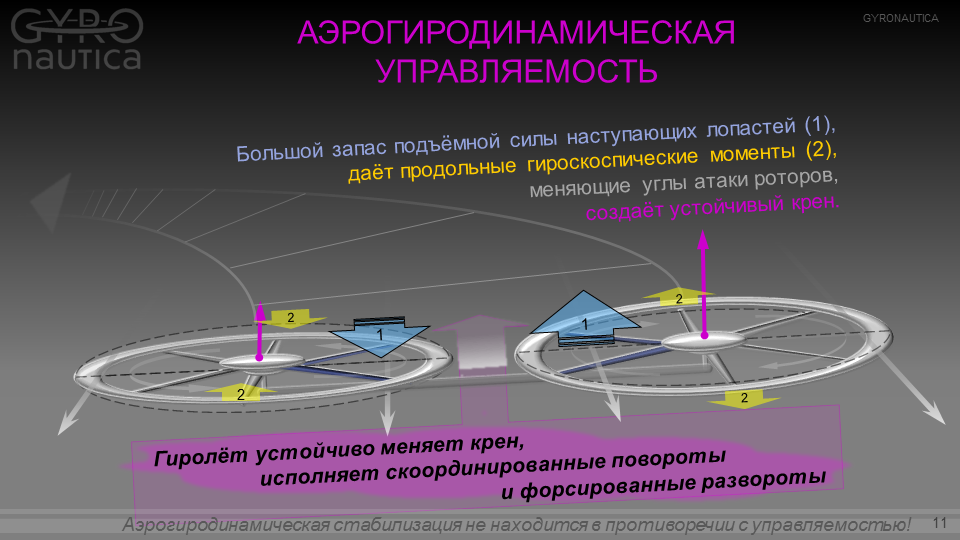
Рис.13. Аэрогиродинамическая управляемость двухроторной поперечной схемы.
Разнесённые маршевые винты, управляемый вектор тяги или управляющие плоскости хвостового оперения в потоке маршевого винта обеспечивают продольное и курсовое управление независимо от скорости полёта, позволяют точно выдерживать траекторию крутого парашютирования, совершать повороты на взлёте и на висении.
Бесшумный летательный аппарат
Акустическое загрязнение среды - важное и пока непреодолимое препятствие для широкого использования ЛА вблизи населённых пунктов. Законодательно водятся всё более жёсткие нормы и временнЫе ограничения.
Взлёт – наиболее энергозатратный и потому самый шумный режим для всех без исключения летательных аппаратов. Закономерно, самыми шумными являются ЛА ВВП. Перегруженные маршевые винты, подъёмные вентиляторы, реактивные сопла - многократно шумнее больших несущих винтов.
Вертолёты шумны не только из-за мощных газотурбинных двигателей. Все винты порождают мощные вихревые жгуты на концах открытых лопастей. Толстые передние кромки атакующих лопастей НВ при косом обтекании дают характерные скачки уплотнения. Положение плоскостей вращения несущего ротора и рулевого винта вызывает активную интерференцию, шумы умножаются, их диаграмма направлена по курсу к земле. Приближение вертолёта слышно за 15 км.
Многолопастное воздушное колесо радикально снижает ВСЕ факторы шумообразования. В полёте скорость вращения несущих роторов минимальна. Внешнее замкнутое крыло исключает образование вихревых жгутов на концах лопастей. При положительном угле атаки плоскостей вращения воздушных колёс главный лепесток диаграммы направленности минимальных шумов разгруженных тонких лопастей не направлен к земле, уходит вверх-вперёд по курсу.
Инерциальный подъём энергетически эффективен, скоротечен, малошумен. В населённых пунктах бесшумный запуск гиролёта возможен из компактных ветро- и шумо-защищённых площадок (коробок) на крышах зданий, без участия маршевой силовой установки, от энергии кабеля внешнего электропитания. Взлёт с крыш не требует высоких оборотов и мощностей от малошумных многолопастных роторов. Самые частые, короткие внутригородские перелёты, проходят на аккумуляторах. Маршевая силовая установка и маршевый винт гиролёта задействуются на полную мощность, только в скоростном полёте на большую дальность, уже на достаточно большой высоте. Малошумный многолопастной маршевый винт нагружен меньше несущих, работает в шумогасящем кольцевом канале, в осевом потоке, невозмущённом несущими роторами.
Инерциальная вертикальная посадка гиролёта малошумна, как у автожира, возможна без активного участия маршевой силовой установки. Гиролёт - малошумный ЛА на всех режимах полёта.
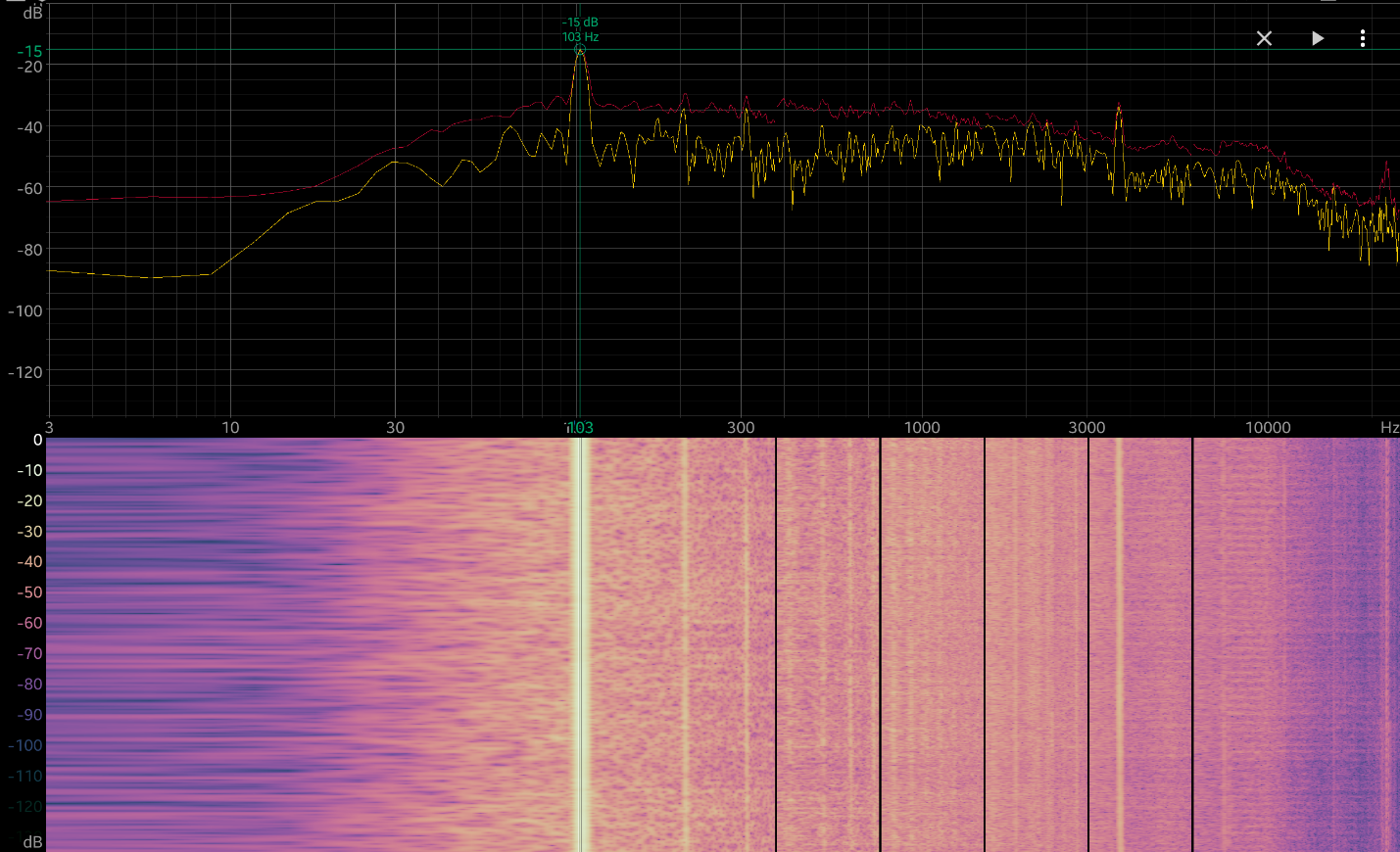
Рис.14 Спектр шума двухлопастного винта имеет характерный пик и доминанты.
Уровень шума ВК на 16db…20db ниже шума двухлопастного винта.
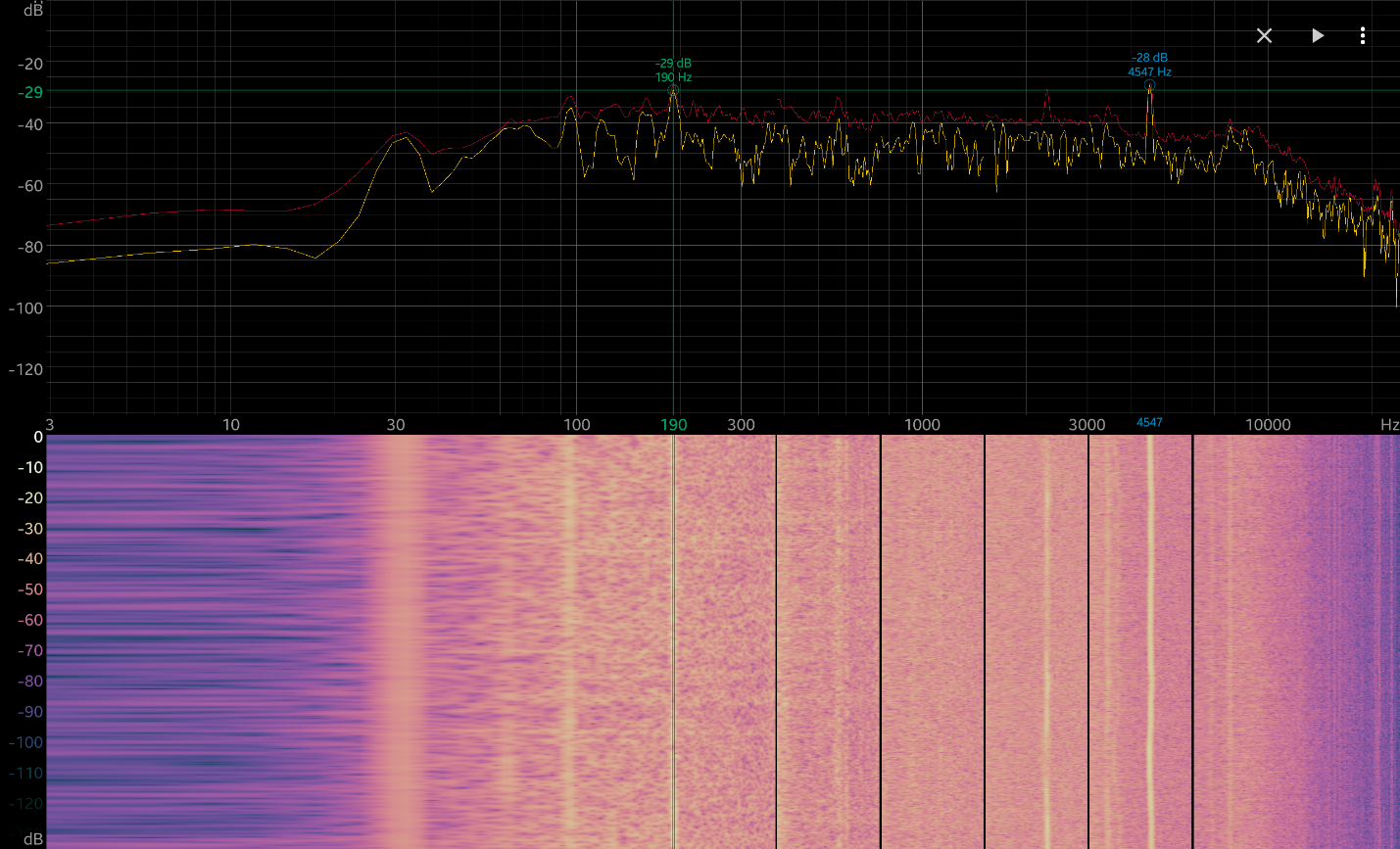
Рис.15 Ровный спектр шума шестилопастного воздушного колеса.
Ротор Воздушное колесо тише шума электропривода.
Надёжность гиролёта
В отличие от традиционных двухлопастных несущих роторов, ВК не имеет опасных режимов в полёте. Лопасти колёс защищены от веток и проводов. Моноблочный несущий автомеханический ротор воздушное колесо с изменяемым общим шагом прочнее, проще и надёжнее вертолётных несущих винтов с шарнирным креплением лопастей и сложной кинематикой автоматов перекоса управления циклическим шагом лопастей.
Кроме прочных несущих роторов ВК с управляемым общим шагом, гиролёт не имеет сложной механики, других критически важных узлов и длинных цепочек агрегатов, выход из строя которых делает невозможным продолжение полёта и совершения безопасной управляемой мягкой посадки. Возможен выход на качественно новый, беспрецедентно высокий уровень надёжности и безопасности полётов без необходимости перевозки дополнительных тяжёлых, малоэффективных пиропарашютных систем аварийного спасения.
Форсированные режимы силовой установки наиболее аварийноопасны. У гиролёта максимальная мощность в широком диапазоне скоростей вращения подводится на несущие роторы только перед взлётом, на земле, от внешнего кабеля электропитания. В воздухе на всех режимах полёта приводы несущих колёс только поддерживают обороты на минимальной мощности. В полёте нет форсированных режимов силовой установки. На опциональном, самом энергозатратном вертолётном режиме полёта, даже при порывистом ветре, подвод мощности к роторам постоянный, соответствует номинальной.
На современном уровне развития технологий электрическая трансмиссия вытеснила иные виды трансмиссий сначала в крупнотоннажном флоте, а теперь, активно наступает в автомобилестроении и авиации. Электрическая трансмиссия удобна в управлении, успешно конкурирует со сложной механикой по массе, стоимости, ресурсу и по важнейшему параметру - надёжности. Надёжный электромотор имеет большой диапазон скорости вращения, позволяет использовать простые=надёжные маршевые винты фиксированного шага.
Использование электрической трансмиссии в сочетании с ёмкими аккумуляторами, позволяющими продолжать полёт и совершать инерциальную вертикальную посадку без участия маршевой силовой установки, дополняет высокий уровень конструктивной надёжности и безопасности, даёт возможность сертифицировать гиролёт для полётов над населёнными пунктами.

Безопасная свобода
Человеку свойственно ошибаться, уставать, отвлекаться, терять самоконтроль, сознательно нарушать строгие правила. Человеческий фактор – основная причина аварийности в авиации, как и в целом на транспорте. Жизнь человека слишком дорога, чтобы взваливать сложное управление и всю ответственность за неизбежные ошибки на пилота. Тотальная автоматизация всех этапов пилотирования в «большой авиации» позволила достичь высокой безопасности авиасообщений. В перспективе речь идёт о полном устранении операторов из кабин поездов, авиалайнеров, транспортных судов. Профессиональный пилот на борту сверхлёгкого летательного аппарата – лишний пассажир, фактор неопределённости, кратное повышение стоимости полёта, противоречит концепции персонального транспорта.
Автоматическая система управления и точное позиционирование позволяют исключить главный фактор неопределённости в рутинной операции перемещения грузов и пассажиров над землёй по прямой траектории из точки А в точку Б. Устойчивый и всепогодный гиролёт способен выполнять все режимы полёта полностью в автоматическом режиме до точки назначения, в строгом соответствии с безопасным полётным планом централизованной системы управления. Пассажирам доступны: навигатор с выбором точки посадки и кнопка «Взлёт».
Сейчас законодательство даёт приоритет и свободу пилотируемой малой авиации с уведомительной системой в зоне G. Всепогодный гиролёт с опциональным ручным пилотированием предельно прост и удобен в использовании. Силовая гироскопическая и аэродинамическая стабилизация с полётным контроллером поддерживают скоординированный крен, стабильный тангаж, обороты роторов, высоту и скорость полёта.
Владельцам свидетельства частного пилота (PPL), прошедшим краткое обучение, доступно управление по курсу (руль) и три кнопки. Две кнопки (+/-) смены эшелона полёта. Третья кнопка вызывает автопилот, возвращающий аппарат на маршрут до точки назначения, исполняющий точную мягкую посадку. Управление гиролётом предельно упрощено и безопасно. Отсутствие возможности исполнять фигуры высшего пилотажа, минимизирует воздушное хулиганство, исключает ошибки пилотирования, гарантирует безопасный, максимально комфортный полёт.
Возможно удобное перемещение по воздуху. Быстрее, комфортнее, экономичнее и безопаснее, чем передвижение по поверхности земли.
Выводы
- Автоматический летательный аппарат для пассажирских перевозок должен обладать полным набором необходимых качеств: безопасностью, надёжностью, всепогодностью, малошумностью, энергетически эффективным вертикальным взлётом, высоким аэродинамическим качеством в скоростном горизонтальном полёте, автоматической безмоторной мягкой вертикальной посадкой.
Ни один из известных альтернативных проектов ЛА ВВП не обладает необходимыми качествами в полной мере, даже, по отдельности.
- Гиролёт - новый тип летательных аппаратов с инерциальным вертикальным взлётом и инерциальной посадкой (ЛА ИВВП, IVTOL), позволяет достичь высоких параметров аэродинамического качества, весового и энергетического совершенства, способен обеспечить безопасный полёт, всепогодный, малошумный, комфортный, надёжный, быстрый, экономичный. Концептуально, наиболее эффективный летательный аппарат для скоростных полётов в плотной тропосфере.
- Воздушное колесо открывает новые возможности развития безаэродромной авиации: беспилотной, малой, большой, транспортной, персональной.
Реально значительно (вполовину) сократить наземный трафик, смертность населения в автокатастрофах, потери экономики от транспортного кризиса. Земля должна стать более безопасным и экологически чистым пространством для комфортной жизни и передвижения людей пешком, на велосипедах и т.п.
- Аэродинамика воздушного колеса представляет большой теоретический и практический интерес. Новые аэродинамические эффекты нуждаются в углублённых исследованиях, построения моделей точных аэродинамических расчётов, оптимизации геометрии элементов воздушного колеса.
- Мировая транспортная революция назрела и неизбежна.
Транспортному проекту государственной важности на начальном этапе необходима минимальная поддержка государства, помощь ФГУП «ЦАГИ». Потеря возможности развития технологии в России грозит большими издержками, ущербом для государства.
Источники
- Бут Д.А., Алиевский Б.Л., Мизюрин С.Р., Васюкевич П.В. Накопители энергии. М. Энергоатом, 1991.
- Вильгрубе Л.С. Вертолёты. Расчёт интегральных аэродинамических характеристик и лётно-технических данных. М. Машиностроение, 1977.
- Джонсон У. Теория вертолёта. В 2-х книгах. Пер. с англ. М.: Мир, 1983.
- Карачевский Г.И. Аэродинамика. Физические основы подъёмной силы и аэродинамического сопротивления материальных тел. ИПХФ РАН, 2010.
- Курочкин Ф.П. Проектирование и конструирование самолётов с вертикальным взлётом и посадкой. М. Машиностроение, 1977.
- Миль М.Л., Некрасов А.В., Браверман А.С., Гродко Л.Н., Лейканд М.А. Вертолеты. Расчет и проектирование. Тома 1,2. М. Машиностроение, 1966.
- Тищенко М.Н., Некрасов А.В., Радин А.С. Вертолёты. Выбор параметров при проектировании. М. Машиностроение, 1976.
- Фабрикант Н.Я. Аэродинамика. М. Наука, 1964.
- Современное состояние гидродинамики вязкой жидкости. Тома 1,2. М. Иностранная литература, 1948.
- Rоsenthal G., Krone N.J., Carns R.A. A special mission V/STOL transport aircraft study. "AIAA Pap.", 1988, № 4477, 1-9
- https://en.wikipedia.org/wiki/Carter_PAV#Operation
https://en.wikipedia.org/wiki/CarterCopter#Takeoff - Патент РФ на группу изобретений №2538737 от 21.11.2014, опуб. 10.01.2015.
«Ротор “воздушное колесо”. Гиростабилизированный летательный аппарат и ветроэнергетическая установка, использующие ротор “воздушное колесо“, наземное/палубное устройство запуска».
Заявки на патенты в США, Евросоюзе, Китае, Канаде.
* * *
Gyronautica LLC
CEO Кузиков С.Ю.
www.gyronautica.ru